Portable Continuous Passive Motion Device
A practical and intuitive option for knee therapy.
Made possible by resources provided by the University of Pittsburgh and mentorship from Dr. Kevin Bell, Brandon Barber, and Amelia Gordon.(September - December 2024)

Clinical Problem Discovery
Knee injuries are an exceedingly common type of injury, with over 600,000 total knee replacement surgeries being performed annually in the U.S. [1] and with knee injuries accounting for 41% of all sports injuries [2].
A commonly used post-procedure therapy is Continuous Passive Motion (CPM), in which the patient’s leg is fixed to a specialized device that slowly induces flexion and extension of the knee joint in order to gradually increase the joint’s workable range of motion.
A major drawback of these CPM machines is that they are large and heavy, making transportability difficult and often requiring patients to make the trip to the clinic or hospital in order to undergo therapy.
As supported by a colleague with personal CPM machine therapy, there is a need for a portable, practical, and intuitive alternative.


The UX is currently entirely dependent on the physical controller and lacks the ability to access saved therapy parameter profiles and show the user their therapy history.
These limitations could be alleviated through integration with an app designed specifically for this device.
Product Ideation
We sought out to develop a user-friendly solution that combined the functionality of a traditional CPM machine with that of a locking straight-leg brace.
Users should be able to go about their day wearing their straight-leg brace, then sit on any bench or chair and initiate their therapy.



Fabrication of the controller required modeling and laser cutting an enclosure to accommodate the LCD screen, buttons, and power input.
Button size, placement, and labels were selected to ensure intuitive UX.
Wires and components were soldered into place to ensure solid and permanent connection.


Limitations & Future Directions
The current controller is bulky and impractical to carry around, so improvement to its size and ergonomics would benefit the user experience.
The current device is only available to be used by those with height ranging from 5’11” to 6’3”, so additional device sizes could be fabricated with the purchasing of different sized linear actuators and leg braces.
References
[1] https://marutihospital.com/the-rising-numbers-how-many-people-undergo-total-knee-replacement-each-year/
[2] https://www.azipc.com/post/knee-injury-statistics#:~:text=The%20Surprising%20Statistics,types%20of%20recreation%20at%2049.3%25
Initial metrics for success were revisited, verified, and validated by:
1. Calculating accuracy of flexion speed and angle using a protractor.
2. Repeat testing of maximum angle, minimum angle, and emergency stop mechanism.
3. Achieving quick and successful device use from a brand-new user.


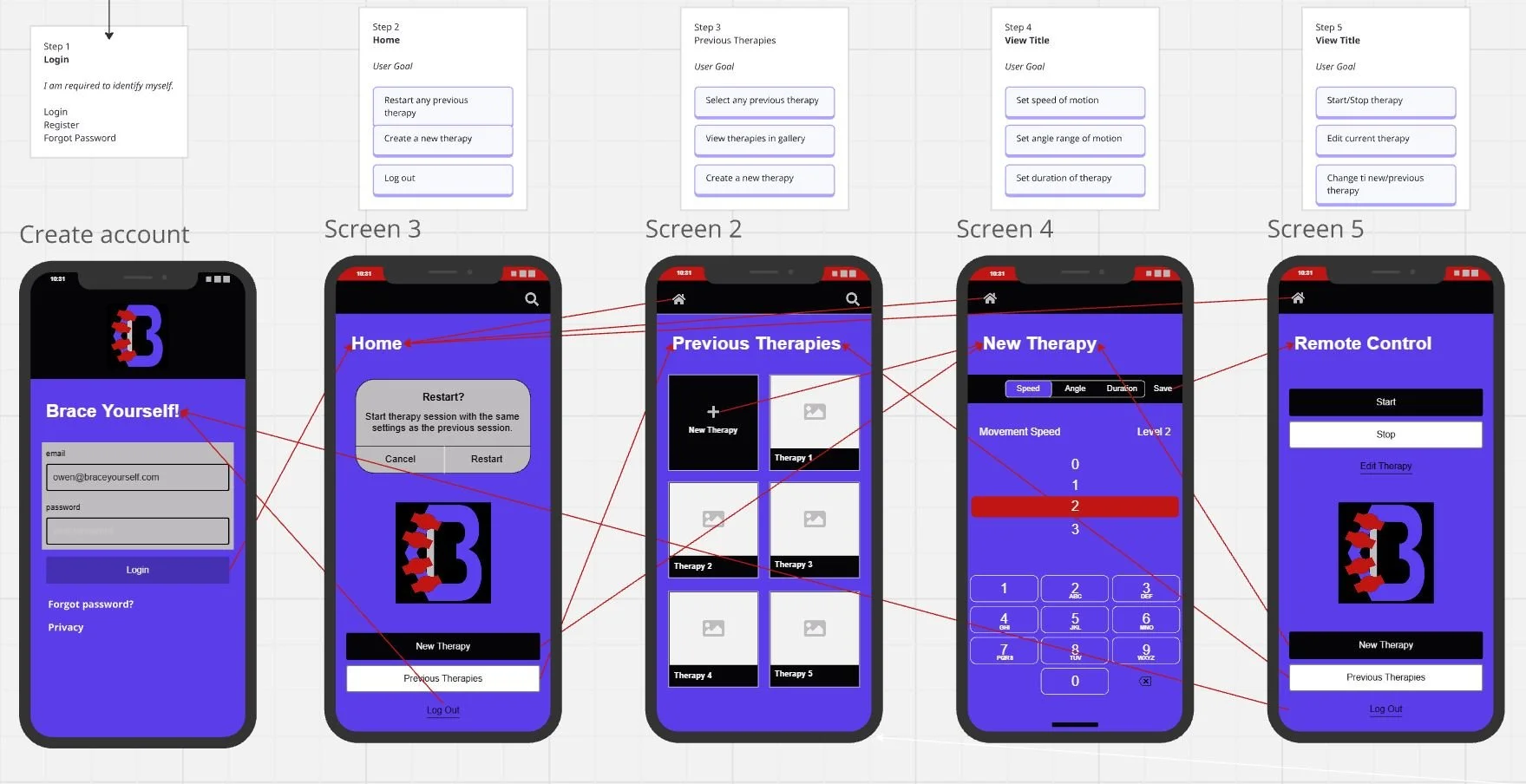


The UX flow was finalized and visualized to confirm accomplishment of intended device use.
Metrics for Success
To ensure the development of a safe and effective prototype, we set multiple goals that if accomplished would successfully replicate the output of a traditional CPM machine while providing the user with an assurance of safety, an intuitive user interface, and the freedom of mobility.
Flexion speed and maximum angle values were selected based on CPM therapy protocol standards.
Prototype 1
The initial prototype served mainly as a proof of concept, with a rudimentary circuit consisting of an Arduino Uno, joystick controller, and stepper motor being used to induce rotation of a custom modeled and laser printed gear mechanism fixed to the knee brace.
Although achieving a low profile mechanism that would add minimal bulk to a user’s leg, drawbacks of this iteration included:
1. Too low of a force output
2. Various pinch points that could result in injury
3. Lack of effective UI
4. Lack of automated flexion/extension
5. Lack of locking mechanism
6. Lack of locking straight-leg brace (which had yet to arrive in the mail)

Prototype 2

The next iteration improved upon the low force output and abundance of pinch points of the first prototype by replacing the gear and stepper motor mechanism with a linear actuator. The length range of the actuator was carefully chosen and the connecting brackets were mindfully drilled into the brace so as to ensure that full actuation would induce 0 degrees of knee flexion and minimum actuation would induce 90 degrees of knee flexion.
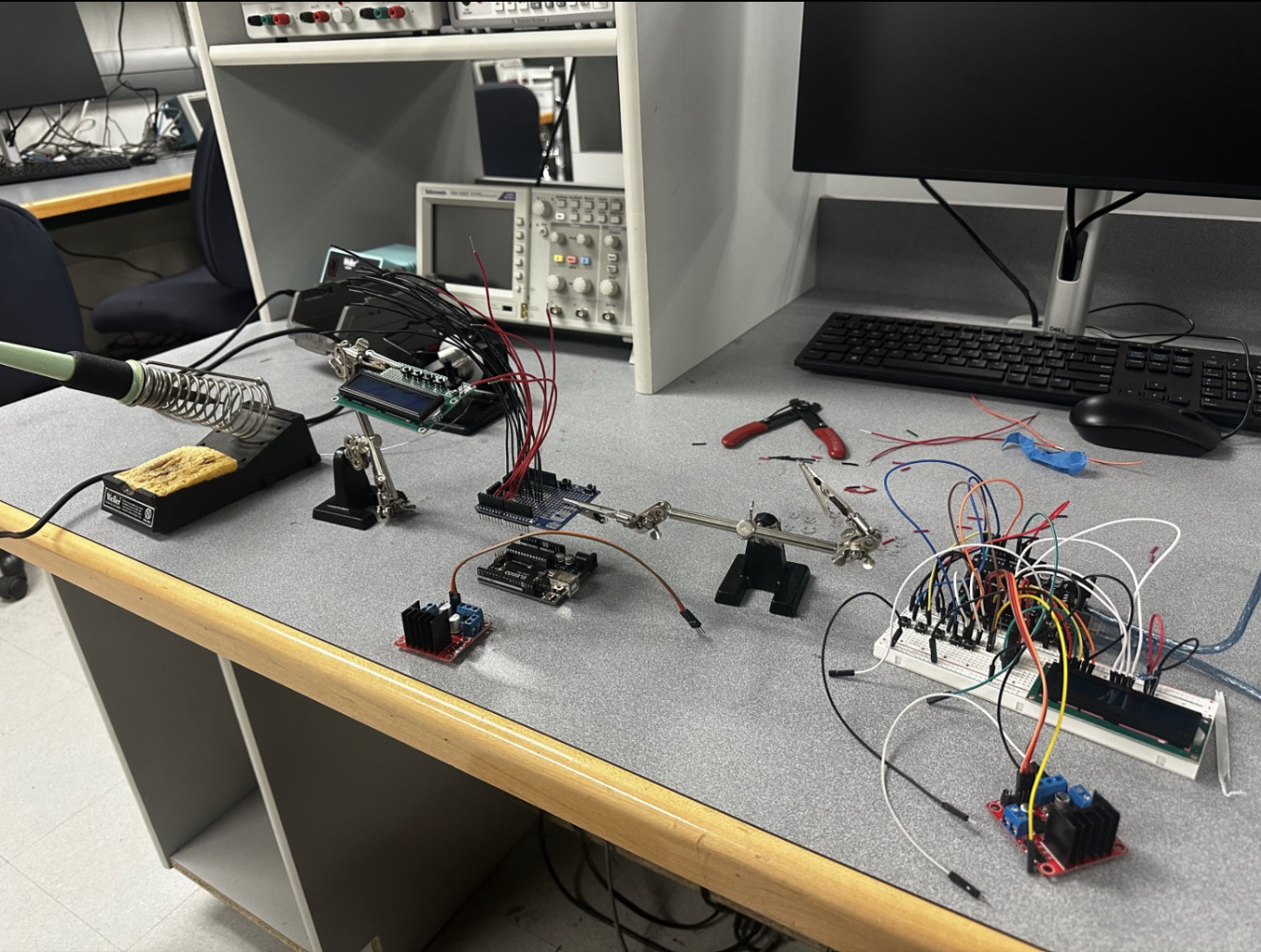
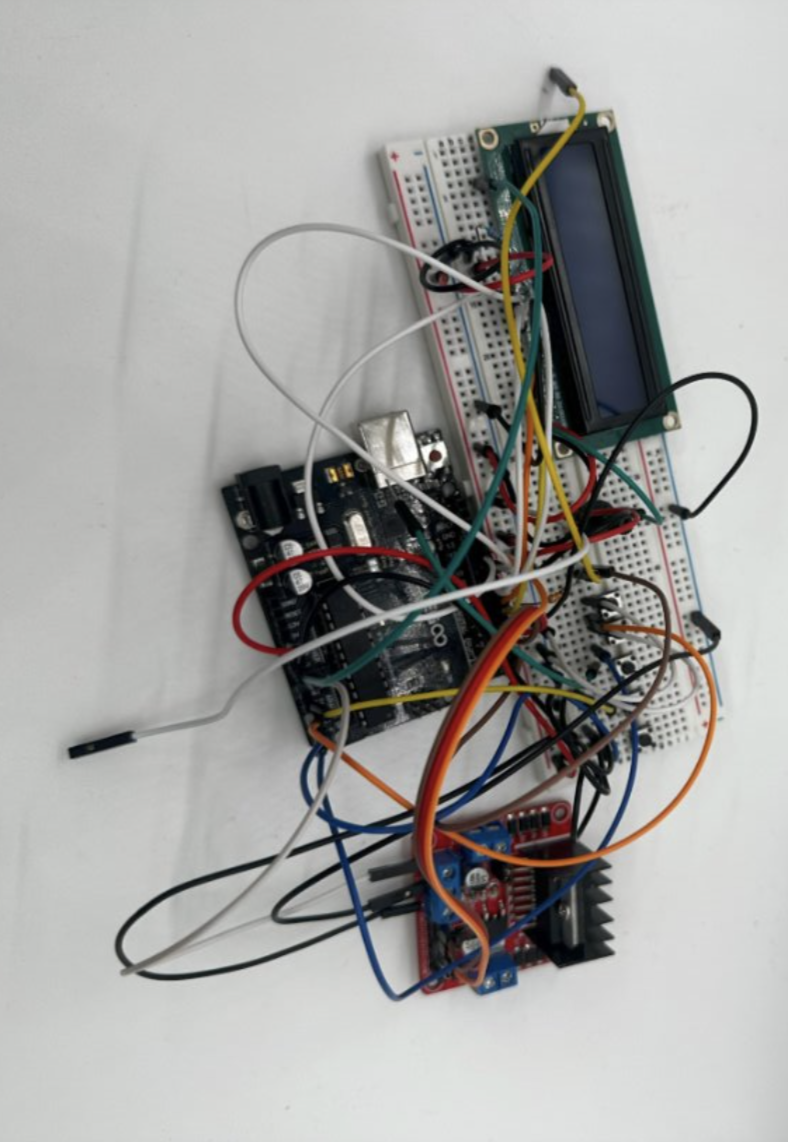
The force output control was accomplished through a circuit consisting of an LCD screen, four buttons, a motor driver, and an Arduino Uno with accompanying Arduino IDE functions which accepted the input of speed and maximum angle of flexion then initiated the cyclical flexion and extension of the linear actuator based on the set parameters. Additionally, a stopping/homing function was included to account for any need to immediately terminate the therapy.
Features of this iteration to improve upon included:
1. A messy, inconvenient user interface
2. Component powering that required carrying around a large battery
3. Lack of user upper-leg support when seated and undergoing therapy
Final Prototype

The final iteration of the device added integration of a wall-mounted AC power adapter for practical on-the-go power, an enclosed and simplified controller, and a padded tripod for upper-leg support.